RESEARCH
DATE: 2022-05-29

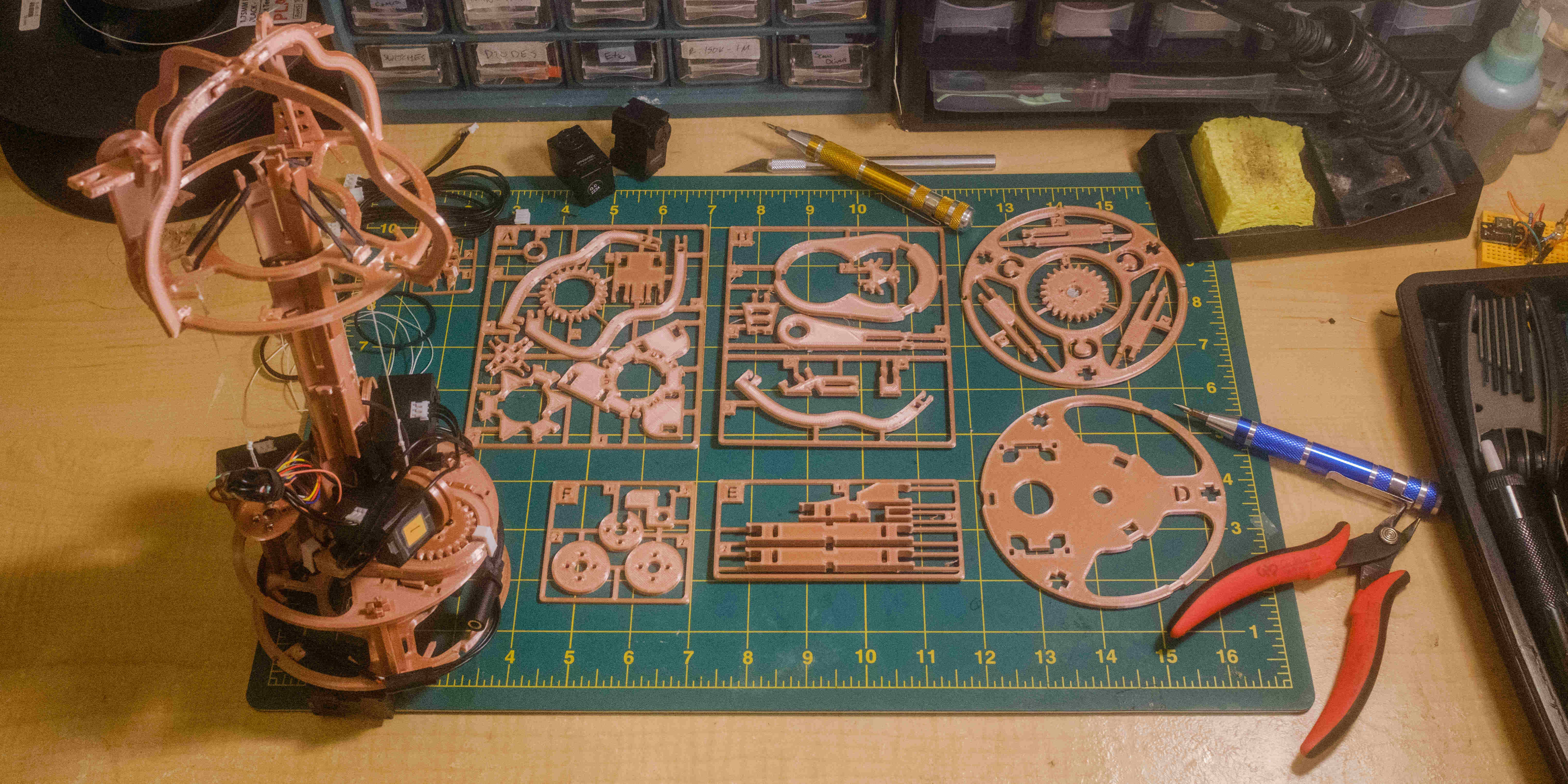
The Blossom robot in its current covered form (top) and its inner frame (bottom). The inner frame is constructed
I developed Blossom, an open-source social robot platform, for my PhD at Cornell. Blossom was designed as a critique of stereotypical mass-manufactured white-and-black LED-illuminated commercial robots. I — and the many students and collaborators whom I had the pleasure of working with — developed Blossom as a robot construction kit, AI research platform, and telepresence device. My presentation at the RoboPhilosophy conference sums up the Blossom project, which is continued by other researchers. My current “rebuild” of the platform has refactored the hardware and software for improved modularity and ongoing development.
My papers are available on this page and on my Google Scholar. My CV is available here.
Thesis
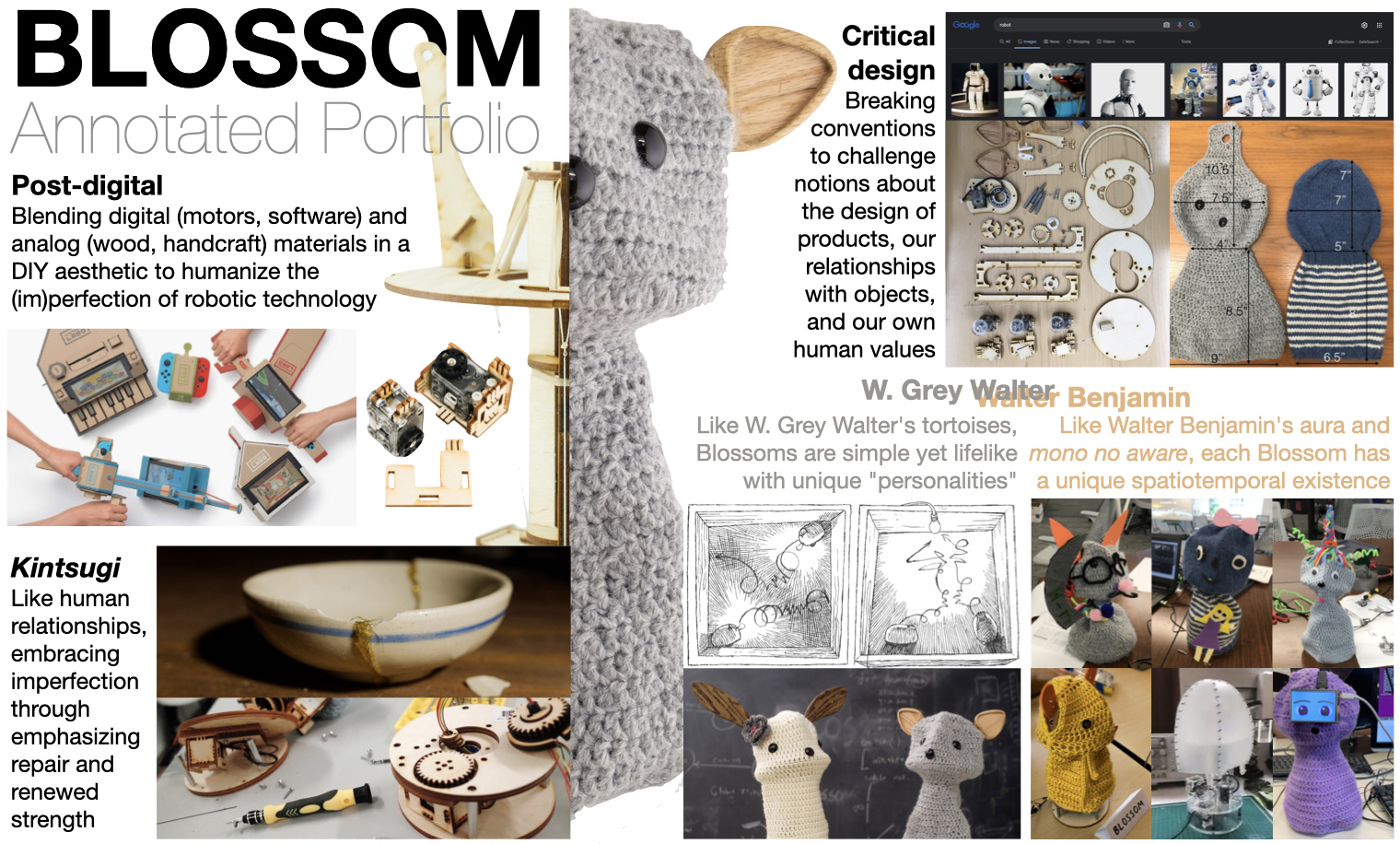
Annotated portfolio of Blossom and its themes.
Journal Papers
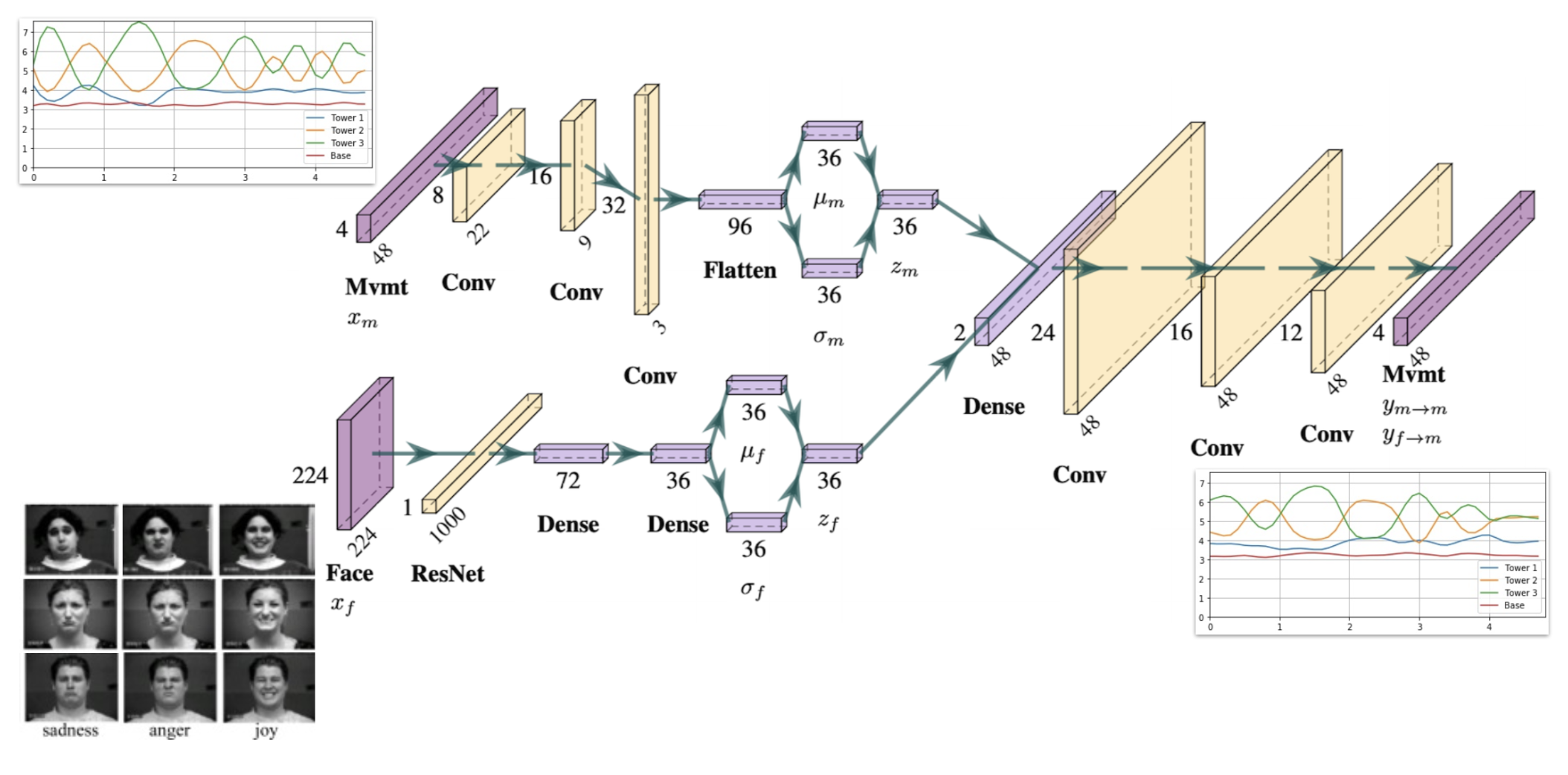
Face-to-gesture translation neural network.
Conference Papers
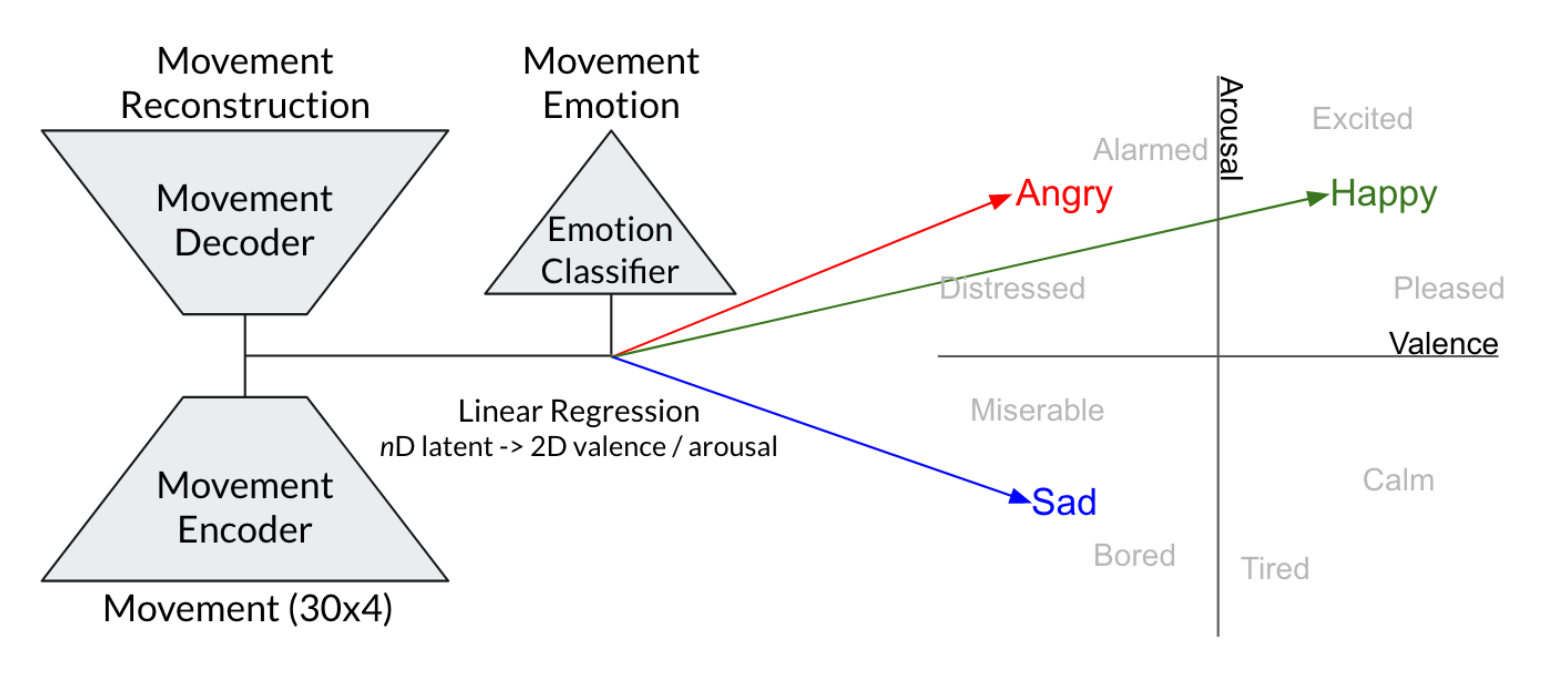
Movement modification neural network, mapped to the affective valence-arousal circumplex model of emotions.
Extended Abstracts
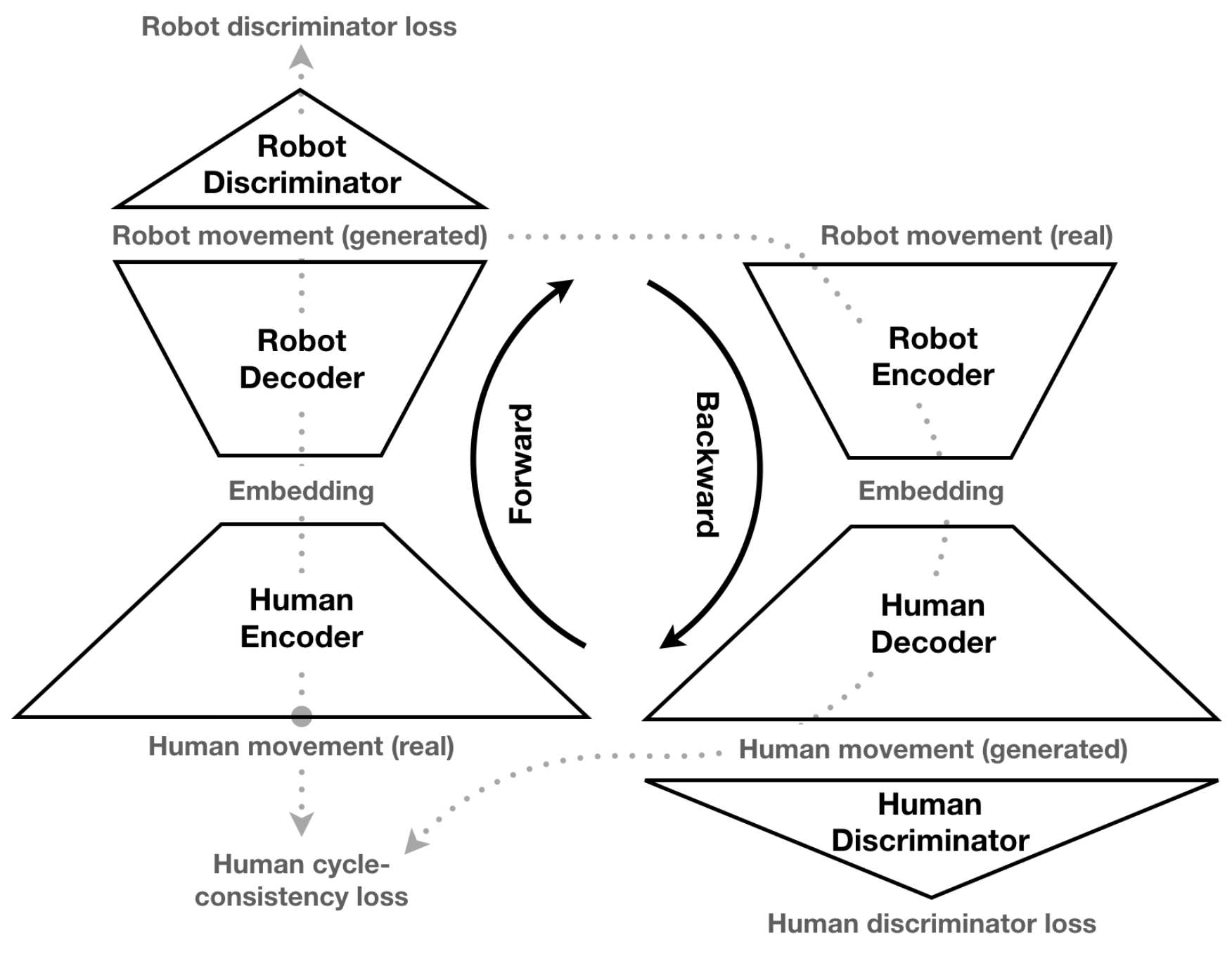
Human-to-robot movement translation CycleGAN network.
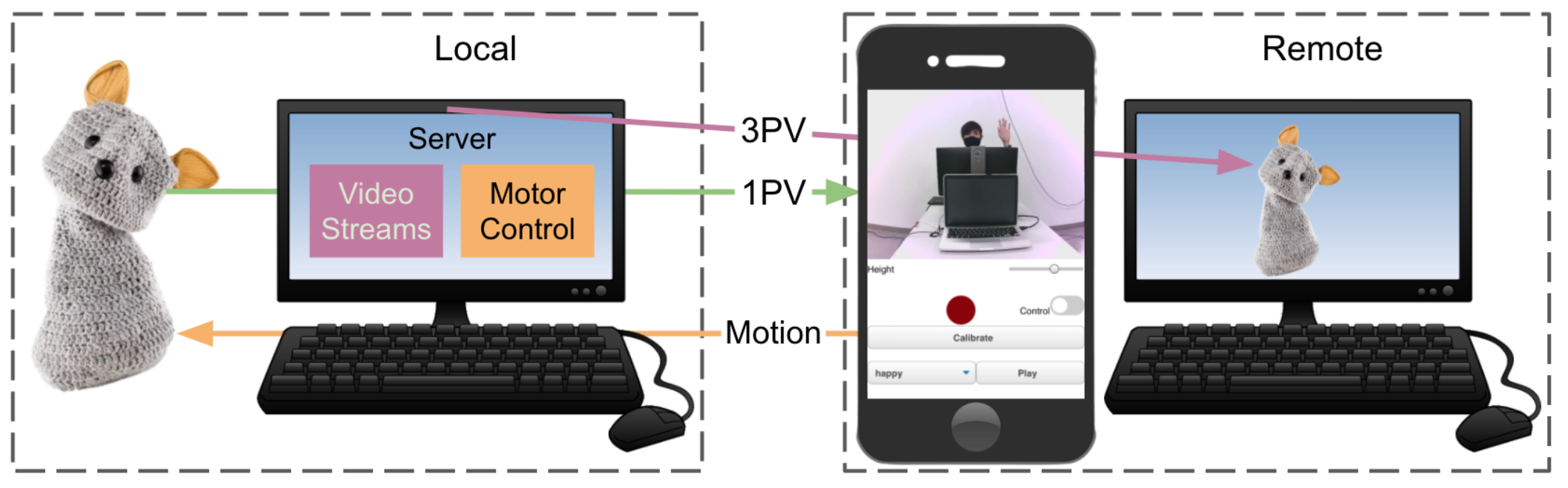
Evaluation setup for telepresence study.
Miscellaneous
Michael Suguitan. Robots as Humanizing Post-Digital Media. In International Conference on Social Robotics (ICSR) Metaphors for HRI Workshop Submissions, 2020.
Michael Suguitan and Guy Hoffman. A Portrait of the Robot as a Communicative Medium: Using the DIY Blossom Robot for Accessible Embodied Telepresence. In International Conference on Social Robotics (ICSR) Student Design Competition (Finalist), 2021.